Machine Learning: Training a HoVer-Net model
In this notebook, we will train HoVer-Net model to perform nucleus detection and classification, using data from PanNuke dataset.
This notebook should be a good reference for how to do a full machine learning workflow using PathML and PyTorch
[1]:
import numpy as np
from tqdm import tqdm
import copy
import matplotlib.pyplot as plt
from matplotlib import cm
import torch
from torch.optim.lr_scheduler import StepLR
import albumentations as A
[2]:
from pathml.datasets.pannuke import PanNukeDataModule
from pathml.ml.hovernet import HoVerNet, loss_hovernet, post_process_batch_hovernet
from pathml.ml.utils import wrap_transform_multichannel, dice_score
from pathml.utils import plot_segmentation
Data augmentation
Data augmentation is the process of applying random transformations to the data before feeding it to the network. This introduces some noise and can help improve model performance by reducing overfitting. For example, each image can be randomly rotated by 90 degrees - the idea is that this would force the network to learn representations which are robust to rotation.
Importantly, whatever transform is applied to the image also needs to be applied to the corresponding mask!
We’ll use the Albumentations library to handle data augmentation. You can also write custom data augmentations, but albumentations and other similar libraries (e.g. torchvision.transforms) are convenient because they automatically handle masks in the augmentation pipeline.
However, because our masks have multiple channels, they are not natively supported by Albumentations. So we’ll wrap each transform in the wrap_transform_multichannel() utility function which will make it compatible.
[3]:
n_classes_pannuke = 6
# data augmentation transform
hover_transform = A.Compose(
[
A.VerticalFlip(p=0.5),
A.HorizontalFlip(p=0.5),
A.RandomRotate90(p=0.5),
A.GaussianBlur(p=0.5),
A.MedianBlur(p=0.5, blur_limit=5),
],
additional_targets={f"mask{i}": "mask" for i in range(n_classes_pannuke)},
)
transform = wrap_transform_multichannel(hover_transform)
Load PanNuke dataset
[4]:
pannuke = PanNukeDataModule(
data_dir="../data/pannuke/",
download=False,
nucleus_type_labels=True,
batch_size=8,
hovernet_preprocess=True,
split=1,
transforms=transform,
)
train_dataloader = pannuke.train_dataloader
valid_dataloader = pannuke.valid_dataloader
test_dataloader = pannuke.test_dataloader
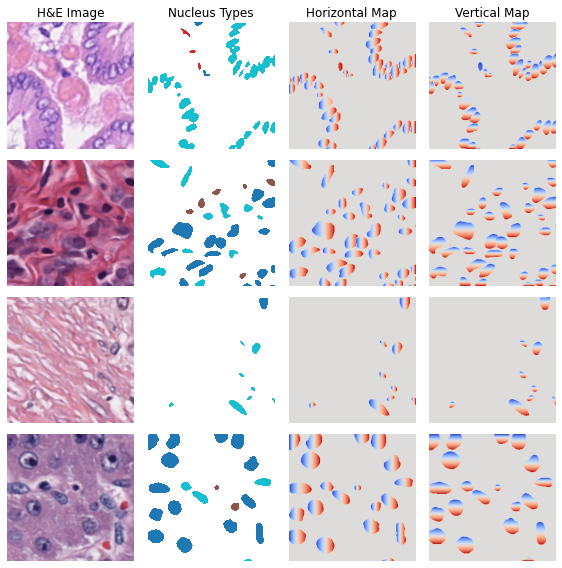
Let’s visualize what the inputs to HoVer-Net model look like:
[7]:
images, masks, hvs, types = next(iter(train_dataloader))
n = 4
fig, ax = plt.subplots(nrows=n, ncols=4, figsize=(8, 8))
cm_mask = copy.copy(cm.get_cmap("tab10"))
cm_mask.set_bad(color="white")
for i in range(n):
im = images[i, ...].numpy()
ax[i, 0].imshow(np.moveaxis(im, 0, 2))
m = masks.argmax(dim=1)[i, ...]
m = np.ma.masked_where(m == 5, m)
ax[i, 1].imshow(m, cmap=cm_mask)
ax[i, 2].imshow(hvs[i, 0, ...], cmap="coolwarm")
ax[i, 3].imshow(hvs[i, 1, ...], cmap="coolwarm")
for a in ax.ravel():
a.axis("off")
for c, v in enumerate(["H&E Image", "Nucleus Types", "Horizontal Map", "Vertical Map"]):
ax[0, c].set_title(v)
plt.tight_layout()
plt.show()
Model Training
Training with multi-GPU
.to(device).torch.nn.DataParallel(). PyTorch will then take care of all the tricky parts of distributing the computation across the GPUs.[5]:
print(f"GPUs used:\t{torch.cuda.device_count()}")
device = torch.device("cuda:0")
print(f"Device:\t\t{device}")
GPUs used: 4
Device: cuda:0
[6]:
n_classes_pannuke = 6
# load the model
hovernet = HoVerNet(n_classes=n_classes_pannuke)
# wrap model to use multi-GPU
hovernet = torch.nn.DataParallel(hovernet)
[7]:
# set up optimizer
opt = torch.optim.Adam(hovernet.parameters(), lr=1e-4)
# learning rate scheduler to reduce LR by factor of 10 each 25 epochs
scheduler = StepLR(opt, step_size=25, gamma=0.1)
[8]:
# send model to GPU
hovernet.to(device);
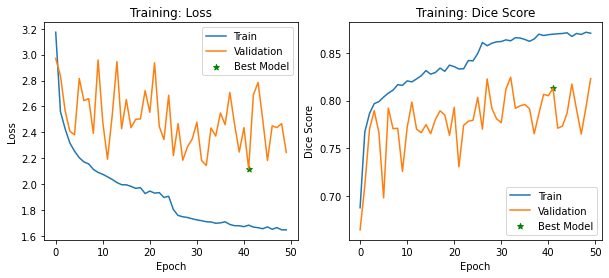
Main training loop
This contains all our logic for looping over batches, doing a forward pass through the network, computing the loss, and then stepping the model parameters to minimize the loss. We also add some code to evaluate the model on the validation set as we train, and to track the performance metrics throughout the training process.
[ ]:
n_epochs = 50
# print performance metrics every n epochs
print_every_n_epochs = None
# evaluating performance on a random subset of validation mini-batches
# this saves time instead of evaluating on the entire validation set
n_minibatch_valid = 50
epoch_train_losses = {}
epoch_valid_losses = {}
epoch_train_dice = {}
epoch_valid_dice = {}
best_epoch = 0
# main training loop
for i in tqdm(range(n_epochs)):
minibatch_train_losses = []
minibatch_train_dice = []
# put model in training mode
hovernet.train()
for data in train_dataloader:
# send the data to the GPU
images = data[0].float().to(device)
masks = data[1].to(device)
hv = data[2].float().to(device)
tissue_type = data[3]
# zero out gradient
opt.zero_grad()
# forward pass
outputs = hovernet(images)
# compute loss
loss = loss_hovernet(outputs=outputs, ground_truth=[masks, hv], n_classes=6)
# track loss
minibatch_train_losses.append(loss.item())
# also track dice score to measure performance
preds_detection, preds_classification = post_process_batch_hovernet(
outputs, n_classes=n_classes_pannuke
)
truth_binary = masks[:, -1, :, :] == 0
dice = dice_score(preds_detection, truth_binary.cpu().numpy())
minibatch_train_dice.append(dice)
# compute gradients
loss.backward()
# step optimizer and scheduler
opt.step()
# step LR scheduler
scheduler.step()
# evaluate on random subset of validation data
hovernet.eval()
minibatch_valid_losses = []
minibatch_valid_dice = []
# randomly choose minibatches for evaluating
minibatch_ix = np.random.choice(
range(len(valid_dataloader)), replace=False, size=n_minibatch_valid
)
with torch.no_grad():
for j, data in enumerate(valid_dataloader):
if j in minibatch_ix:
# send the data to the GPU
images = data[0].float().to(device)
masks = data[1].to(device)
hv = data[2].float().to(device)
tissue_type = data[3]
# forward pass
outputs = hovernet(images)
# compute loss
loss = loss_hovernet(
outputs=outputs, ground_truth=[masks, hv], n_classes=6
)
# track loss
minibatch_valid_losses.append(loss.item())
# also track dice score to measure performance
preds_detection, preds_classification = post_process_batch_hovernet(
outputs, n_classes=n_classes_pannuke
)
truth_binary = masks[:, -1, :, :] == 0
dice = dice_score(preds_detection, truth_binary.cpu().numpy())
minibatch_valid_dice.append(dice)
# average performance metrics over minibatches
mean_train_loss = np.mean(minibatch_train_losses)
mean_valid_loss = np.mean(minibatch_valid_losses)
mean_train_dice = np.mean(minibatch_train_dice)
mean_valid_dice = np.mean(minibatch_valid_dice)
# save the model with best performance
if i != 0:
if mean_valid_loss < min(epoch_valid_losses.values()):
best_epoch = i
torch.save(hovernet.state_dict(), f"hovernet_best_perf.pt")
# track performance over training epochs
epoch_train_losses.update({i: mean_train_loss})
epoch_valid_losses.update({i: mean_valid_loss})
epoch_train_dice.update({i: mean_train_dice})
epoch_valid_dice.update({i: mean_valid_dice})
if print_every_n_epochs is not None:
if i % print_every_n_epochs == print_every_n_epochs - 1:
print(f"Epoch {i+1}/{n_epochs}:")
print(
f"\ttraining loss: {np.round(mean_train_loss, 4)}\tvalidation loss: {np.round(mean_valid_loss, 4)}"
)
print(
f"\ttraining dice: {np.round(mean_train_dice, 4)}\tvalidation dice: {np.round(mean_valid_dice, 4)}"
)
# save fully trained model
torch.save(hovernet.state_dict(), f"hovernet_fully_trained.pt")
print(f"\nEpoch with best validation performance: {best_epoch}")
36%|███▌ | 18/50 [4:22:48<7:46:23, 874.50s/it]
[23]:
fix, ax = plt.subplots(nrows=1, ncols=2, figsize=(10, 4))
ax[0].plot(epoch_train_losses.keys(), epoch_train_losses.values(), label="Train")
ax[0].plot(epoch_valid_losses.keys(), epoch_valid_losses.values(), label="Validation")
ax[0].scatter(
x=best_epoch,
y=epoch_valid_losses[best_epoch],
label="Best Model",
color="green",
marker="*",
)
ax[0].set_title("Training: Loss")
ax[0].set_xlabel("Epoch")
ax[0].set_ylabel("Loss")
ax[0].legend()
ax[1].plot(epoch_train_dice.keys(), epoch_train_dice.values(), label="Train")
ax[1].plot(epoch_valid_dice.keys(), epoch_valid_dice.values(), label="Validation")
ax[1].scatter(
x=best_epoch,
y=epoch_valid_dice[best_epoch],
label="Best Model",
color="green",
marker="*",
)
ax[1].set_title("Training: Dice Score")
ax[1].set_xlabel("Epoch")
ax[1].set_ylabel("Dice Score")
ax[1].legend()
plt.show()
Evaluate Model
Now that we have trained the model, we can evaluate performance on the held-out test set.
First we load the weights for the best model:
[30]:
# load the best model
checkpoint = torch.load("hovernet_best_perf.pt")
hovernet.load_state_dict(checkpoint)
[30]:
<All keys matched successfully>
Next, we loop through the test set and store the model predictions:
[69]:
hovernet.eval()
ims = None
mask_truth = None
mask_pred = None
tissue_types = []
with torch.no_grad():
for i, data in tqdm(enumerate(test_dataloader)):
# send the data to the GPU
images = data[0].float().to(device)
masks = data[1].to(device)
hv = data[2].float().to(device)
tissue_type = data[3]
# pass thru network to get predictions
outputs = hovernet(images)
preds_detection, preds_classification = post_process_batch_hovernet(
outputs, n_classes=n_classes_pannuke
)
if i == 0:
ims = data[0].numpy()
mask_truth = data[1].numpy()
mask_pred = preds_classification
tissue_types.extend(tissue_type)
else:
ims = np.concatenate([ims, data[0].numpy()], axis=0)
mask_truth = np.concatenate([mask_truth, data[1].numpy()], axis=0)
mask_pred = np.concatenate([mask_pred, preds_classification], axis=0)
tissue_types.extend(tissue_type)
341it [16:56, 2.98s/it]
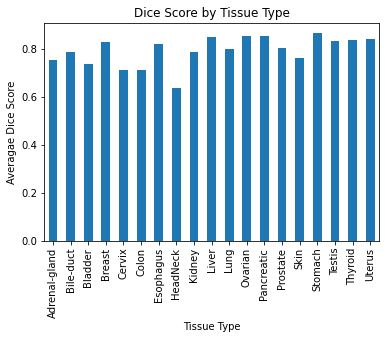
Now we can compute the Dice score for each image in the test set:
[70]:
# collapse multi-class preds into binary preds
preds_detection = np.sum(mask_pred, axis=1)
dice_scores = np.empty(shape=len(tissue_types))
for i in range(len(tissue_types)):
truth_binary = mask_truth[i, -1, :, :] == 0
preds_binary = preds_detection[i, ...] != 0
dice = dice_score(preds_binary, truth_binary)
dice_scores[i] = dice
[124]:
dice_by_tissue = pd.DataFrame({"Tissue Type": tissue_types, "dice": dice_scores})
dice_by_tissue.groupby("Tissue Type").mean().plot.bar()
plt.title("Dice Score by Tissue Type")
plt.ylabel("Averagae Dice Score")
plt.gca().get_legend().remove()
plt.show()
[72]:
print(f"Average Dice score in test set: {np.mean(dice_scores)}")
Average Dice score in test set: 0.7850396088887557
Examples
Let’s take a look at some example predictions from the network to see how it is performing.
[100]:
# change image tensor from (B, C, H, W) to (B, H, W, C)
# matplotlib likes channels in last dimension
ims = np.moveaxis(ims, 1, 3)
[119]:
n = 8
ix = np.random.choice(np.arange(len(tissue_types)), size=n)
fig, ax = plt.subplots(nrows=n, ncols=2, figsize=(8, 2.5 * n))
for i, index in enumerate(ix):
ax[i, 0].imshow(ims[index, ...])
ax[i, 1].imshow(ims[index, ...])
plot_segmentation(ax=ax[i, 0], masks=mask_pred[index, ...])
plot_segmentation(ax=ax[i, 1], masks=mask_truth[index, ...])
ax[i, 0].set_ylabel(tissue_types[index])
for a in ax.ravel():
a.get_xaxis().set_ticks([])
a.get_yaxis().set_ticks([])
ax[0, 0].set_title("Prediction")
ax[0, 1].set_title("Truth")
plt.tight_layout()
plt.show()
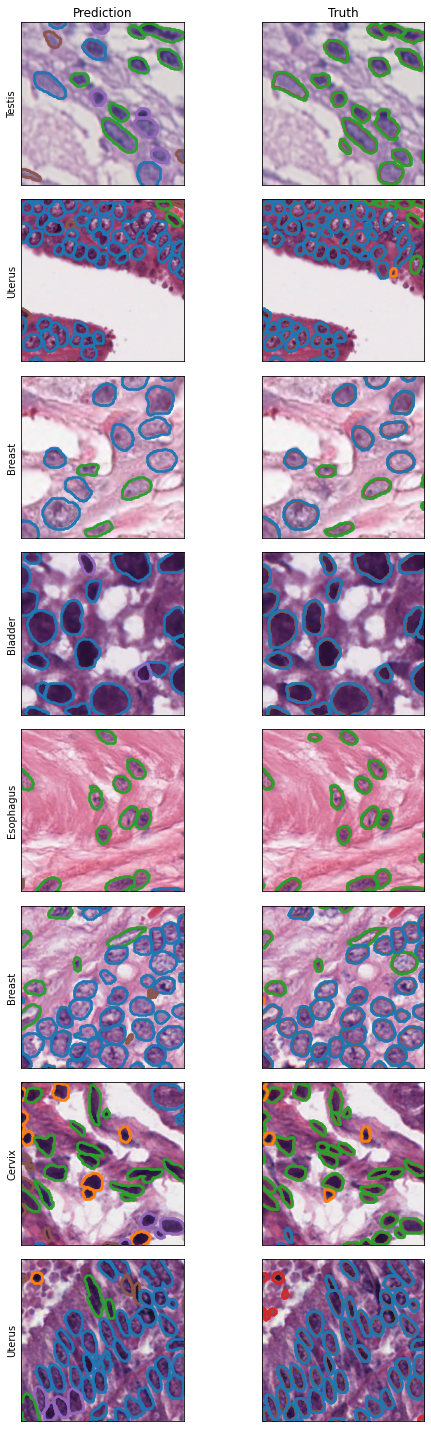
We can see that the model is doing quite well at nucleus detection, although there are some discrepancies in nucleus classification.
Conclusion
We trained HoVer-Net from scratch on the public PanNuke dataset to perform simulataneous nucleus segmentation and classification. We wrote model training and evaluation loops in PyTorch, including code to distribute training across 4 GPUs. The trained model performs well, with an average Dice coefficient of 0.785 on held-out test set. We also evaluated performance across tissue types, finding that the model performs best in Stomach tissue and worst in Head & Neck tissue.
Load this pre-trained model and test it out yourself!
References
Gamper, J., Koohbanani, N.A., Benet, K., Khuram, A. and Rajpoot, N., 2019, April. Pannuke: an open pan-cancer histology dataset for nuclei instance segmentation and classification. In European Congress on Digital Pathology (pp. 11-19). Springer, Cham.
Graham, S., Vu, Q.D., Raza, S.E.A., Azam, A., Tsang, Y.W., Kwak, J.T. and Rajpoot, N., 2019. Hover-net: Simultaneous segmentation and classification of nuclei in multi-tissue histology images. Medical Image Analysis, 58, p.101563.
Session info
[26]:
import IPython
print(IPython.sys_info())
print(f"torch version: {torch.__version__}")
{'commit_hash': '223e783c4',
'commit_source': 'installation',
'default_encoding': 'utf-8',
'ipython_path': '/opt/conda/envs/pathml/lib/python3.8/site-packages/IPython',
'ipython_version': '7.19.0',
'os_name': 'posix',
'platform': 'Linux-4.19.0-12-cloud-amd64-x86_64-with-glibc2.10',
'sys_executable': '/opt/conda/envs/pathml/bin/python',
'sys_platform': 'linux',
'sys_version': '3.8.6 | packaged by conda-forge | (default, Dec 26 2020, '
'05:05:16) \n'
'[GCC 9.3.0]'}
torch version: 1.7.1
[29]:
# hash for PathML commit:
!git rev-parse HEAD
3f68d77d0c7b324acce74214e713a0bf79e60d84